Exploration
Ocean Exploration and Surveillance
Underwater vehicles and particularly autonomous devices (AUVs) are being extensively developed today for ocean exploration and surveillance in several countries around the world.
Marine archaeology can benefit from these developments, since AUVs offer unprecedented capability for mapping the ocean floor at any depth, over large areas, for long periods, and at relatively minor expense. In particular, the development of multiple-vehicle systems and AUVs with outstanding positioning capabilities will provide increased ability to map and retrieve artifacts from the ocean floor.
Marine Archaeology
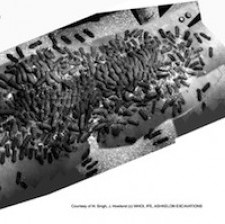
Underwater archeology seeks to use advanced robotic vehicles and systems to perform in situ mapping of historical artifacts discovered at sea. Technologies are being developed for the precision mapping of shipwrecks on the seabed—techniques that won’t disturb the wreckage site. Researchers are also developing mapping and navigation techniques for marine robots, including innovations that can pinpoint the precise location of AUVs.
Deep water archaeology at MIT is centered in the DeepArch Group, which develops methodology and technology for shipwreck exploration in the world’s deep oceans. A wide range of disciplines is brought to bear, including archaeology, history, economics, geology, oceanography, and various branches of engineering.